
A Novel Flying Ad Hoc Network Simulator with Automatic Code Generation for Unmanned Aircraft Systems (AVENS)


AVENS is part of a major research project concerning the provision of a test bed to simulate UAV (Unmanned Aerial Vehicle) flight and control, using different, controlled and changeable configurations. The main intention of AVENS is to provide a simulation test bed for virtual experiments of network coverage and connectivity among UAVs flying in cooperation or sharing the same airspace.
The purpose of AVENS is to offer a platform for mobile ad hoc networks analysis where UAVs are mobile nodes sharing the wireless medium for exchanging messages. The goal is to use a flight simulator for controlling the aerial vehicles and a network simulator for obtaining network measurements such as transmission rate, goodput, RSSI (Received Signal Strength Indication), throughput, package loss, number of retransmission etc.
The two base simulation platforms selected for integration are the XPlane Flight Simulator and the OMNeT++ Network Simulator, which is integrated with LARISSA (Portuguese only) in AVENS. In short, LARISSA provides a reliable and easy way to generate automatic code for OMNeT++ from an abstract UAV modeling.
The following figure describes how AVENS works.
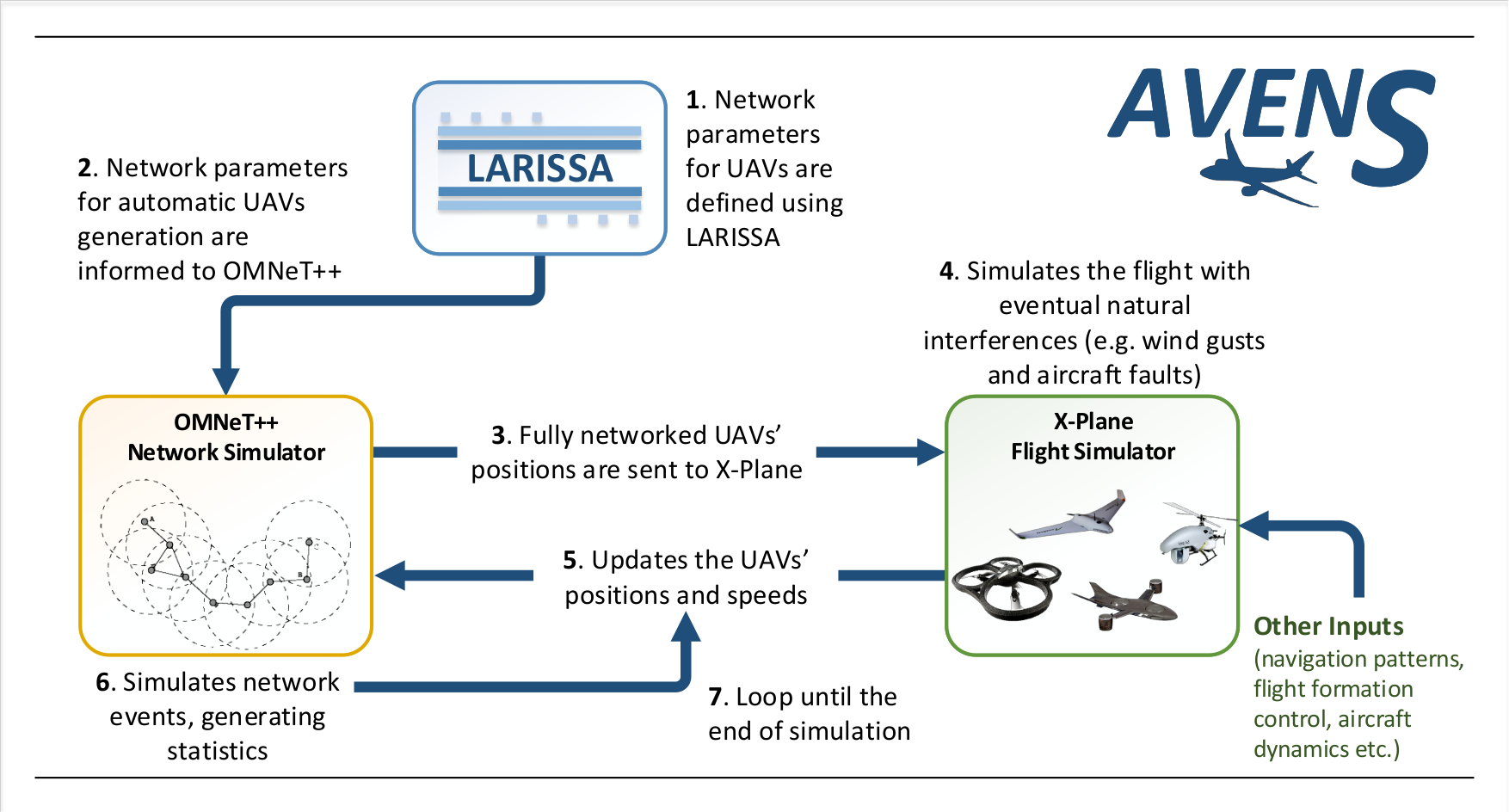
AVENS provides more accuracy and reliability for the simulation by retrieving mobility model information from X-Plane's navigation pattern and updating UAVs positions on OMNeT++. OMNeT++ is used to simulate the network conditions when the nodes are moving based on positions generated by X-Plane. At the current version, this mobility model does not consider node connectivity when determining node's position. In future releases, a mobility model that governs the UAVs flight based on the network connectivity will be available for simulation. Such approaches allow the modelling and development of more realistic protocols and mobility models for FANETs (Flying Ad hoc NETworks).
The integration between simulators is implemented by a plug-in on X-Plane side and a module on OMNeT++ side, both of them responsible for exchanging information through an XML file. The following video shows AVENS working.
Publication
More details on how to set up and run simulations on AVENS are available in the following publication:
Marconato, E. A., Rodrigues, M., Pires, R. M., Pigatto, D. F., Filho, L. C. Q., Pinto, A. S. R., & Branco, K. R. L. J. C. AVENS – A Novel Flying Ad Hoc Network Simulator with Automatic Code Generation for Unmanned Aircraft System. In The Hawaii International Conference on System Sciences (HICSS), 2017.
Download
AVENS source code is available on GitHub.
Projeto de Doutorado: Análise de espalhamento de informação em redes FANET
![]() Aluno(a) de Doutorado: Rayner de Melo Pires
Aluno(a) de Doutorado: Rayner de Melo Pires
Título do projeto: Análise de espalhamento de informação em redes FANET
Resumo: Os veículos aéreos não tripulados vêm apresentando destaque crescente no setor aeronáutico mundial, tanto no desenvolvimento dos mesmos quanto nas diferentes e variadas aplicações para esses veículos, devido ao seu superior potencial de utilização quando comparado ao potencial das aeronaves tripuladas convencionais. Em muitas aplicações, utilizar múltiplos VANTs apresenta várias vantagens sobre o emprego de um único VANT. No entanto, a agregação pode experimentar problemas inerentes à comunicação sem fios, que possam causar novos problemas nesse agrupamento e inviabilizar a coordenação e a execução em grupo de uma missão. Em um cenário não colaborativo, VANTs com algum nível de autonomia e que partilhem do mesmo espaço aéreo ainda deverão ser capazes de trocar informações entre si, principalmente informações sobre posicionamento e rota de voo, e também estarão suscetíveis a alguns problemas da comunicação sem fios. Para balancear as vantagens e as desvantagens, esses robôs precisarão tomar decisões que otimizem a rede e a comunicação entre eles, através da aplicação de algoritmos que equilibrem adequadamente técnicas de anulação de retransmissões e técnicas de difusão de informações. A fim de investigar estes cenários, este projeto de doutorado visa estudar e propor novas soluções para troca de informações entre VANTs que se comuniquem utilizando uma rede intermitentemente conectada mas evitando o problema de broadcast storm causado pelo excesso de retransmissão das mesmas mensagens em uma rede densa.
Palavras-chave: Redes sem fio; tempestade de broadcast; FANET; Veículos aéreos não tripulados.
Período: 2014 - em desenvolvimento
Para conhecer outros projetos de pesquisa desenvolvidos no LSEC, acesse o menu Pesquisa.
M.Sc. Project: Development of a Plug-and-play Engine to Smart Sensors Arrays in Unmanned Aerial Systems
M.Sc. Student: Rayner de Melo Pires
Project title: Development of a Plug-and-play Engine to Smart Sensors Arrays in Unmanned Aerial Systems.
Abstract: Unmanned aerial vehicles (UAVs) applications has grown substantially in recent years. Roadmaps predict that in the near future these aircrafts will dominate the airspace, requiring new architectures for embedded systems that can ensure a coordinated and safe operation. The tasks performed by these aircrafts should be more complex and diverse than those performed by manned aircrafts today. In fact, most of the tasks is highly based on a set of sensors carried by the aircraft as part of the payload. This work includes the development of the SSI/SSP (Smart Sensor Interface/Smart Sensor Protocol), a plug and play mechanism for attaching sensors to the aircraft – called MOSA (Mission Oriented Sensors Array) – providing automatic configuration of the MOSA unit (or units) and the aircraft itself to accomplish a specific mission. It is part of the work selection/adaptation of the hardware which will be used and the specification and implementation of the SSP protocol. This requires the characterization of the basic services provided by the aircraft through a framework based on a service-oriented architecture (SOA), the KBF (Knowledge Based Framework for Dynamically Changing Applications). The developed protocol should be validated in a hardware-in-the-loop testbed so that we can verify its functionality, performance and proper operation.
Keywords: Unmanned Aerial Vehicles, Critical Embedded Systems, Smart Sensors Protocols
Period: 2011 - nowadays
To see more about LSEC projects, go to Research page.
Projeto de Mestrado: Aplicação de um Algoritmo Evolucionário para Adaptação e Otimização do Piloto Automático de um VANT
Aluno(a) de Mestrado: André Gomes Benjamim
Título do projeto: Aplicação de um Algoritmo Evolucionário para Adaptação e Otimização do Piloto Automático de um VANT
Resumo: A busca para tornar os veículos autônomos, sejam eles terrestres, aquáticos ou aéreos, vem se tornando cada vez mais comum. Com a popularização dos Veículos Aéreos Não Tripulados (VANTs), em razão de fatores como custo e da facilidade de construção de modelos em escalas menores, como os mini-VANTs, os estudos para a construção de um VANT autônomo vem crescido cada vez mais. Muitos dos estudos focam no desenvolvimento e comparativo de diversos modelos de controle para VANTs, dentro os quais pode-se citar o PID, Lógica Fuzzy, H∞ e Redes Neurais. Este trabalho visa utilizar um Algoritmo Evolucionário para auxiliar na otimização e adapação do controle de um VANT. A partir de um conjunto de estruturas pré-determinadas, o algoritmo deverá ser capaz de ajustar os parâmetros que melhor condizem com a situação em que o VANT se encontra, permitindo que o VANT possa se adaptar em diversos ambientes.
Palavras-chave: Veículos Aéreos Não Tripulados; Sistemas Embarcados Críticos; Inteligência Artificial
Período: 2013 - em desenvolvimento
Para conhecer outros projetos de pesquisa desenvolvidos no LSEC, acesse o menu Pesquisa.
Ph.D. Project: Layered architecture model for interconnection of systems in UAS - LARISSA
Ph.D. Student: Emerson Alberto Marconato
Project title: Layered architecture model for interconnection of systems in UAS - LARISSA
Abstract: Architecture models have been used to allow more adequate and structured development of systems, from the simplest to the most complex. The use of models in embedded systems are used to enable compliance standards, reduction in production time and ease of maintenance and development, especially when it comes to critical embedded systems such as unmanned aerial vehicles. Critical embedded systems have specific requirements, such as high reliability and real-time response, security and performance. The definition of an architectural model that deals with these requirements and standards and provides the service to standards allowing the correct and fast development is innovative and will provide benefits to the scientific and industrial communities. In this sense, this work developed an architectural model for the interconnection of Unmanned Aerial Vehicles (UAVs) in Unified Modeling Language (UML) called LARISSA (Layered ARchitecture model for Interconnection of SystemS in uAs). As a result of this development it was possible the modelling and specification of a complete UAV and the conduction of several experiments that allowed LARISSA validation. The experiments focused on the communication enabled the design of a UAV networks simulator. The results showed the efficiency and effectiveness of LARISSA architecture model, as well as its flexibility in carrying out different experiments, which helps in getting data to facilitate the certification process of these UAVs.
Keywords: Architecture Model, UAV, UAS, Reference Model, Critical Embedded Systems
Period: 2011 - nowadays
To see more about LSEC projects, go to Research page.
Mais artigos...
- Ph.D. Project: Service Oriented Architecture for complex critical embedded systems - a case study focused on avionics
- Post-doctorate Project: Generation of spectral signatures for detection of pathologies in Eucalyptus crops - A study using UAVs
- Ph.D Project: A control system focused on minimizing drift - specification of a VTOL
- Ph.D. Project: Extending unmanned aircraft systems: specification of a security and mobile-based data communication architecture