
A Novel Flying Ad Hoc Network Simulator with Automatic Code Generation for Unmanned Aircraft Systems (AVENS)


AVENS is part of a major research project concerning the provision of a test bed to simulate UAV (Unmanned Aerial Vehicle) flight and control, using different, controlled and changeable configurations. The main intention of AVENS is to provide a simulation test bed for virtual experiments of network coverage and connectivity among UAVs flying in cooperation or sharing the same airspace.
The purpose of AVENS is to offer a platform for mobile ad hoc networks analysis where UAVs are mobile nodes sharing the wireless medium for exchanging messages. The goal is to use a flight simulator for controlling the aerial vehicles and a network simulator for obtaining network measurements such as transmission rate, goodput, RSSI (Received Signal Strength Indication), throughput, package loss, number of retransmission etc.
The two base simulation platforms selected for integration are the XPlane Flight Simulator and the OMNeT++ Network Simulator, which is integrated with LARISSA (Portuguese only) in AVENS. In short, LARISSA provides a reliable and easy way to generate automatic code for OMNeT++ from an abstract UAV modeling.
The following figure describes how AVENS works.
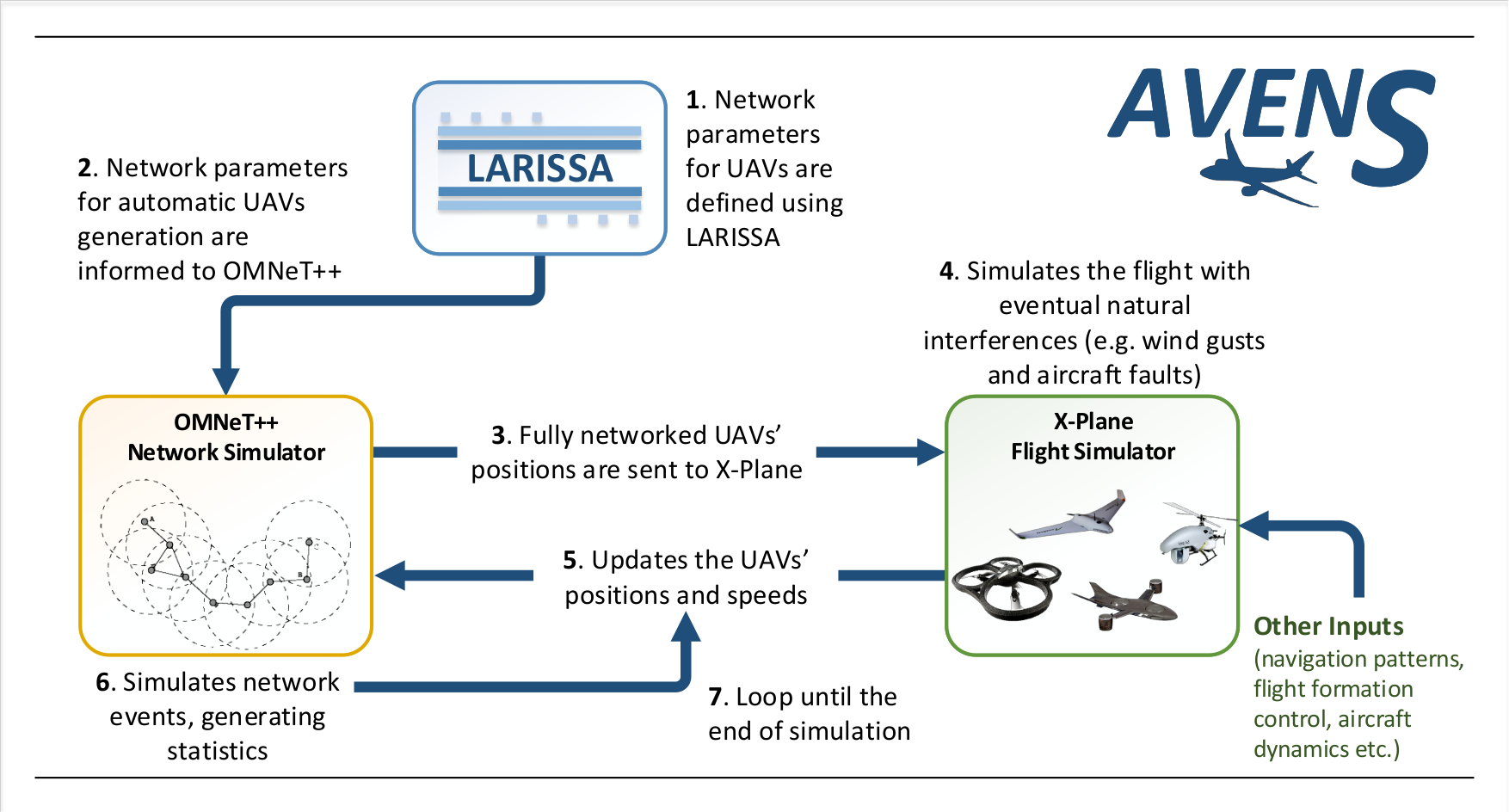
AVENS provides more accuracy and reliability for the simulation by retrieving mobility model information from X-Plane's navigation pattern and updating UAVs positions on OMNeT++. OMNeT++ is used to simulate the network conditions when the nodes are moving based on positions generated by X-Plane. At the current version, this mobility model does not consider node connectivity when determining node's position. In future releases, a mobility model that governs the UAVs flight based on the network connectivity will be available for simulation. Such approaches allow the modelling and development of more realistic protocols and mobility models for FANETs (Flying Ad hoc NETworks).
The integration between simulators is implemented by a plug-in on X-Plane side and a module on OMNeT++ side, both of them responsible for exchanging information through an XML file. The following video shows AVENS working.
Publication
More details on how to set up and run simulations on AVENS are available in the following publication:
Marconato, E. A., Rodrigues, M., Pires, R. M., Pigatto, D. F., Filho, L. C. Q., Pinto, A. S. R., & Branco, K. R. L. J. C. AVENS – A Novel Flying Ad Hoc Network Simulator with Automatic Code Generation for Unmanned Aircraft System. In The Hawaii International Conference on System Sciences (HICSS), 2017.
Download
AVENS source code is available on GitHub.
PhD Project: Analysis of information spreading in FANET networks
![]() PhD Student: Rayner de Melo Pires
PhD Student: Rayner de Melo Pires
Project title: Analysis of information spreading in FANET networks
Abstract: Unmanned aerial vehicles are increasingly being emphasised on the global aeronautical sector, both in their development and in the different applications of these vehicles due to their higher potential for use in diverse applications, when compared to the potential of conventional manned aircraft. In many applications, a group of UAVs can provide several advantages over one aircraft. However, aggregation can experience problems of wireless communication, which may cause new problems and derail the coordination and the group execution of a mission. In a non-collaborative scenario, UAVs with some level of autonomy and sharing the same airspace should still be able to exchange information, especially safety-information such as positions and flight paths, and they will be also susceptible to some wireless problems. To balance the advantages and disadvantages, these robots will need to make decisions that optimize the network and the communication between them, by applying algorithms that properly balance broadcast avoidance techniques and information dissemination techniques. In order to investigate these scenarios, this PhD research project aims to study and propose new solutions to information exchange between UAVs that communicate with each other using an intermittently connected network yet avoiding the broadcast storm problem, caused by excessive retransmission of duplicated messages in a dense network. To perform the tests, we intend to start with Software-in-the-Loop simulation using the Omnet++ network simulator and the X-Plane flight simulator.
Keywords: Wireless communication; broadcast storm problem; Flying Ad hoc Network (FANET); Unmanned Aerial Vehicles (UAV).
Duration: 2014 - in progress
To see more about LSEC projects, go to Research page.
M.Sc. Project: Computer networks virtualization - an approach focused on mobility and georeferencing
M.Sc. Student: Paulo Henrique Moreira Gurgel
Project title: Computer networks virtualization - an approach focused on mobility and georeferencing
Abstract: Study computer networks is not a trivial task. It is possible to learn networks through books, magazines, specialized forums, but practical experimentation is important. The problem arises when you need to conduct experiments, as this is a costly process, involving the availability of various facilities and privileges to modify settings of any of them, possibly breaking the system. Availability of laboratories and equipment costs for small research groups can, also, be a prohibitive factor. There are tools that can provide practical experimentation, through simulation and / or virtualization of these scenarios. However, such tools do not effectively solves issues such as mobile, wireless, embedded devices and georeferencing. This project aims to create a tool capable of performing the experiments so that it can cover these gaps efficiently and consuming fewer resources. The proposed tool will allow preconfigured scenarios or developed by end users to provide validation and verification environments being studied, either by students who are having their first contact with the technologies experienced, either by network administrators who need to validate a new configuration or topology, either by research groups that need to verify the implementation of a new communication protocol.
Keywords: Netkit, Computer networks, Mobile networks, Security, IPv6
Period: 2012 - nowadays
To see more about LSEC projects, go to Research page.
Projeto de Mestrado: Aplicação de um Algoritmo Evolucionário para Adaptação e Otimização do Piloto Automático de um VANT
Aluno(a) de Mestrado: André Gomes Benjamim
Título do projeto: Aplicação de um Algoritmo Evolucionário para Adaptação e Otimização do Piloto Automático de um VANT
Resumo: A busca para tornar os veículos autônomos, sejam eles terrestres, aquáticos ou aéreos, vem se tornando cada vez mais comum. Com a popularização dos Veículos Aéreos Não Tripulados (VANTs), em razão de fatores como custo e da facilidade de construção de modelos em escalas menores, como os mini-VANTs, os estudos para a construção de um VANT autônomo vem crescido cada vez mais. Muitos dos estudos focam no desenvolvimento e comparativo de diversos modelos de controle para VANTs, dentro os quais pode-se citar o PID, Lógica Fuzzy, H∞ e Redes Neurais. Este trabalho visa utilizar um Algoritmo Evolucionário para auxiliar na otimização e adapação do controle de um VANT. A partir de um conjunto de estruturas pré-determinadas, o algoritmo deverá ser capaz de ajustar os parâmetros que melhor condizem com a situação em que o VANT se encontra, permitindo que o VANT possa se adaptar em diversos ambientes.
Palavras-chave: Veículos Aéreos Não Tripulados; Sistemas Embarcados Críticos; Inteligência Artificial
Período: 2013 - em desenvolvimento
Para conhecer outros projetos de pesquisa desenvolvidos no LSEC, acesse o menu Pesquisa.
M.Sc. Project: Development of a Plug-and-play Engine to Smart Sensors Arrays in Unmanned Aerial Systems
M.Sc. Student: Rayner de Melo Pires
Project title: Development of a Plug-and-play Engine to Smart Sensors Arrays in Unmanned Aerial Systems.
Abstract: Unmanned aerial vehicles (UAVs) applications has grown substantially in recent years. Roadmaps predict that in the near future these aircrafts will dominate the airspace, requiring new architectures for embedded systems that can ensure a coordinated and safe operation. The tasks performed by these aircrafts should be more complex and diverse than those performed by manned aircrafts today. In fact, most of the tasks is highly based on a set of sensors carried by the aircraft as part of the payload. This work includes the development of the SSI/SSP (Smart Sensor Interface/Smart Sensor Protocol), a plug and play mechanism for attaching sensors to the aircraft – called MOSA (Mission Oriented Sensors Array) – providing automatic configuration of the MOSA unit (or units) and the aircraft itself to accomplish a specific mission. It is part of the work selection/adaptation of the hardware which will be used and the specification and implementation of the SSP protocol. This requires the characterization of the basic services provided by the aircraft through a framework based on a service-oriented architecture (SOA), the KBF (Knowledge Based Framework for Dynamically Changing Applications). The developed protocol should be validated in a hardware-in-the-loop testbed so that we can verify its functionality, performance and proper operation.
Keywords: Unmanned Aerial Vehicles, Critical Embedded Systems, Smart Sensors Protocols
Period: 2011 - nowadays
To see more about LSEC projects, go to Research page.
More Articles...
- Ph.D. Project: Layered architecture model for interconnection of systems in UAS - LARISSA
- Ph.D. Project: Service Oriented Architecture for complex critical embedded systems - a case study focused on avionics
- Post-doctorate Project: Generation of spectral signatures for detection of pathologies in Eucalyptus crops - A study using UAVs
- Ph.D Project: A control system focused on minimizing drift - specification of a VTOL